正文
3D
到
2D
:
fk-1
是
3
维,
fk
是它们对应的图像上的
2D
重投影。单目相机情况下,
3D
结构需要从
2
个相邻的相机视图(比如
Ik-2
和
Ik-1
)进行三角化,然后和第
3
幅视图中的
2D
图像特征进行匹配(比如,
Ik
)。在单目算法中,需要匹配至少
3
幅视图。
注意,特征可能是点或者线。通常,在无结构的场景中由于缺乏直线,就在视觉里程计中使用点特征。一个深入分析这三种点和线特征方法的论文,在参考论文
74
中可见。本文只讲解点特征的推导。
4.1 2D
到2D:图像特征匹配中的运动
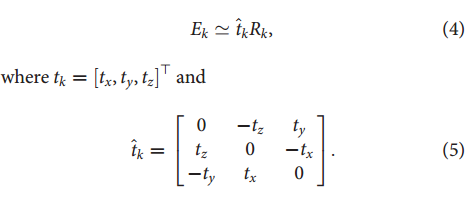
4.1.1 估计本征矩阵
校准过的相机图像
Ik
和
Ik-1
之间的几何关系可以通过本征矩阵
E
表示。
E
中包含了相机运动参数具有一个未知的平移变换因子:
符号
 表示等式右边是标量乘法。
表示等式右边是标量乘法。
2D
到
2D
的特征对应关系可以计算本征矩阵,旋转和平移矩阵可以通过本征矩阵进行分解计算。
2D
到
2D
的运动估计最重要的特征是对极约束,它形成一条直线连接两个对应的特征点
 和
和
 ,
是另一幅图像像对应的特征点,如图
4
所示。
,
是另一幅图像像对应的特征点,如图
4
所示。
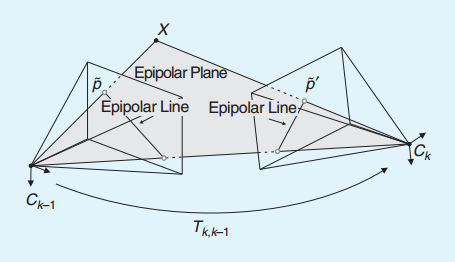
这个约束可以通过等式
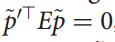 推导,其中
是其中一幅图像
Ik
的特征位置,
是另一幅图像
Ik-1
上对应的特征的位置。
和
的图像坐标是在同一坐标系一致的。
推导,其中
是其中一幅图像
Ik
的特征位置,
是另一幅图像
Ik-1
上对应的特征的位置。
和
的图像坐标是在同一坐标系一致的。
为了简化,我们将归一化的坐标记为
 ,(详细参考“透视相机模型”)。类似的等式,也可以通过单位圆球的归一化坐标推导,(如“圆球模型”所示)。
,(详细参考“透视相机模型”)。类似的等式,也可以通过单位圆球的归一化坐标推导,(如“圆球模型”所示)。
用对极约束计算
2D
到
2D
特征匹配的本征矩阵。最小化方案是采用
5
个
2D
到
2D
的对应关系,如论文
75
,
Nister
的论文
76
提供了一种实现方法。
Nister
的
5
点算法成为标准的
2D
到
2D
的运动估计方法,包括对离群点的处理。对于
n>=8
的非共面点的一种简单直接的计算方法是
Longuet-Higgins
的
8
点算法,如论文
2
中总结。每个特征匹配都给出一个约束:

8
点法得到的这些约束进行排列可以得到一个线性方程组
AE=0
,通过解方程,就可以计算出
E
的值。这个齐次方程组可以很容易通过奇异值分解(
SVD
)计算,如论文
2
。如果超过
8
个点会产生超定方程组(方程个数大于未知量个数的方程组),如果超定方程组给定的条件(限制)过于严格,导致解不存在,就用最小二乘法进行拟合,求出最小二乘解,该方法对噪声具有鲁棒性。矩阵
A
的奇异值分解(
SVD
)形式为
A=USV
T
,
E
的最小二乘估计为
||E||=1
可以用
V
的最后一行查找。然而,
E
的线性估计并不满足本征矩阵的特征约束,它是旋转矩阵
R
和反对称平移
t
的乘积。在本征矩阵的奇异值里面可以看到这些约束。经过奇异值分解(
SVD
)分解后的本征矩阵是
E=USV
T
,提取主对角线上值
diag(S)={s,s,0}
,第一个和第二个奇异值相等,第三个是
0
。为了得到满足约束的有效的本征矩阵
E
,需要将它投影到具有有效的本征矩阵的空间中去。投影本征矩阵为
 。
。
当
3
维空间中点共面时,
8
点算法方案退化。相应的,
5
点算法则可以应用于计算共面点。最后,
8
点算法对校准过的(透视或全景)相机和没有校准的相机都可适用,
5
点算法只适用于校准过的(透视或全景)相机。
4.1.2
从本征矩阵E提取旋转矩阵R和平移矩阵t
从计算估计出来的
 中,可以提取旋转和平移矩阵。通常,对同一本征矩阵有
4
种不同的方法求解
R
中,可以提取旋转和平移矩阵。通常,对同一本征矩阵有
4
种不同的方法求解
R