正文
)
和
(Q
1
− Q
2
)
减少了测量中的偏移常量。还有就是,相位角公式中的商值可以减少
距离测量中的增益常量的影响,比如,系统中的放大或衰减,或者反射的强度。
反射亮度(
A
)和偏移(
B
)会影响深度测量的精度。深度值方差可以用以下公式估计:

调制常量
cd
描述了飞行时间传感器分离和收集光电信号的好坏程度。反射光强,
A
,是光
强的函数。偏移,
B
,是环境光和系统内部偏移的函数。可以从公式
6
得到结论是高幅度,高调
制频率和高调制对比度,可以增加精度;但高偏移会导致相机饱和从而降低精度。
高频情况下,由于芯片硅半导体的特性,调制对比度会衰减。这是调制频率的实际上线。具
有快速下降沿频率的飞行时间相机精度更高。
连续波测量基于相位,每
2
π重复一次,意味着距离就会产生锯齿。产生锯齿的距离,称为
模糊距离,
damb
,用公式
7
表示:
 距离出现循环,
damb
就是最大的观测距离。如果需要增加观测距离,就需要减小调制频
率,根据公式
6
,就会减小精度。
距离出现循环,
damb
就是最大的观测距离。如果需要增加观测距离,就需要减小调制频
率,根据公式
6
,就会减小精度。
如果不想妥协,高级飞行时间系统就会采用多频技术增加距离而不减小调制频率。增加一个
或多个调制频率混合可以生成多频技术。每个调制频率都有一个不同的模糊距离,但真正的位
置是多个频率相交的地方。两个调制频率相交,称为差(分)频(率),通常很低,对应一个较长的模糊距离。双频技术方法如下所示。
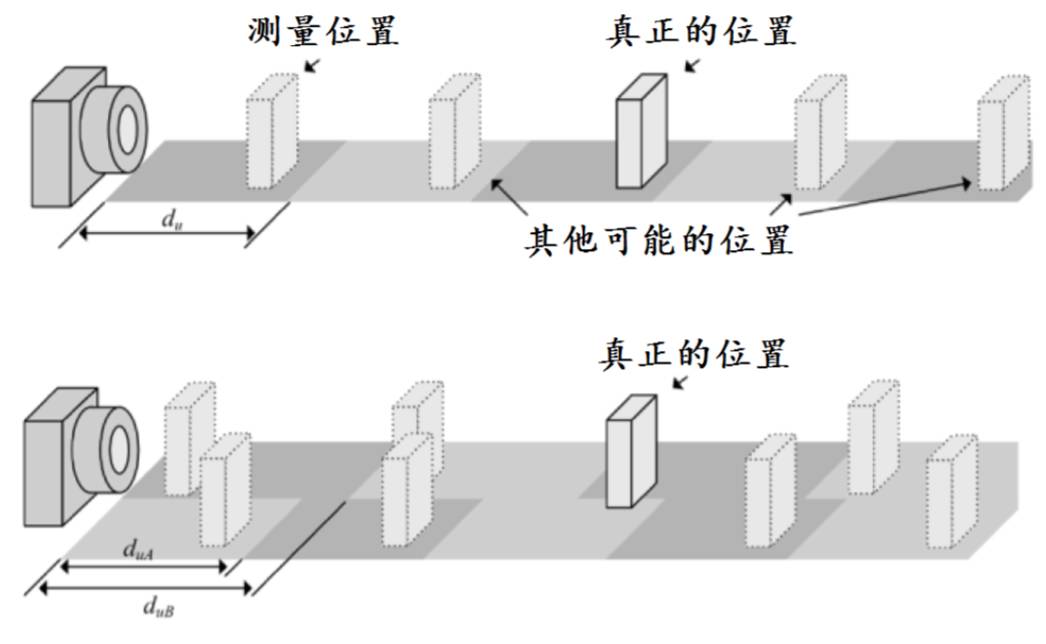
图
3
: 用多频技术增加距离
3.点云
飞行时间传感器,测量
2
维可寻址的阵列传感器中的每个像素的距离,生成深度图。深度
图是
3
维点云的集合(每个点称为一个
体素
)。比如,
QVGA
传感器的深度图有
320x240
个
体素。深度图的
2
维表示是一个灰度图,如图
4
易拉罐所示,亮度比较亮,比较近的体素。图
4
显示了一组易拉罐深度图。
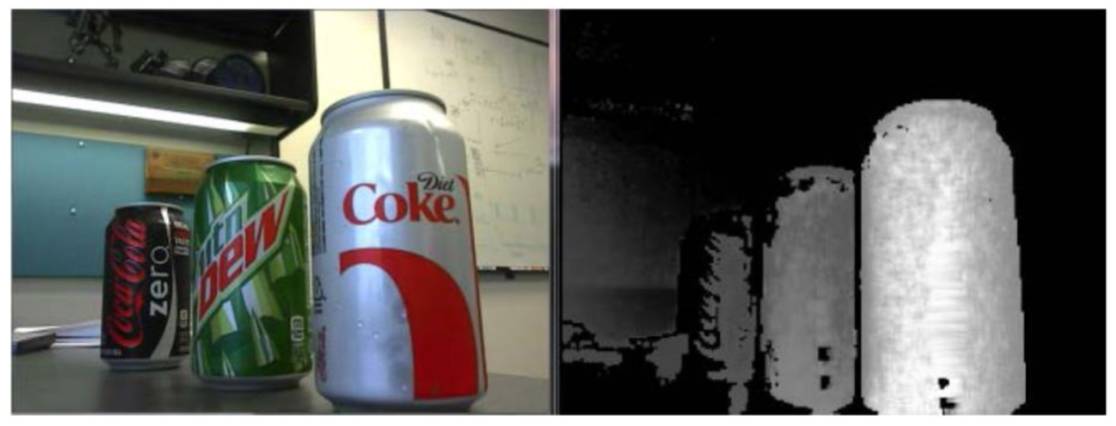
图
4
: 易拉罐深度图
另外,深度图可以通过一系列的点组成的三维空间来渲染,或者
点云
。
3D
点可以连接形
成网格,表明影射有材质贴图。如果有同一物体的实时彩色图像生成材质,就可以渲染出逼真
的
3D
物体,如图
5
所示。图片中的人可以旋转人像看不同的透视图。
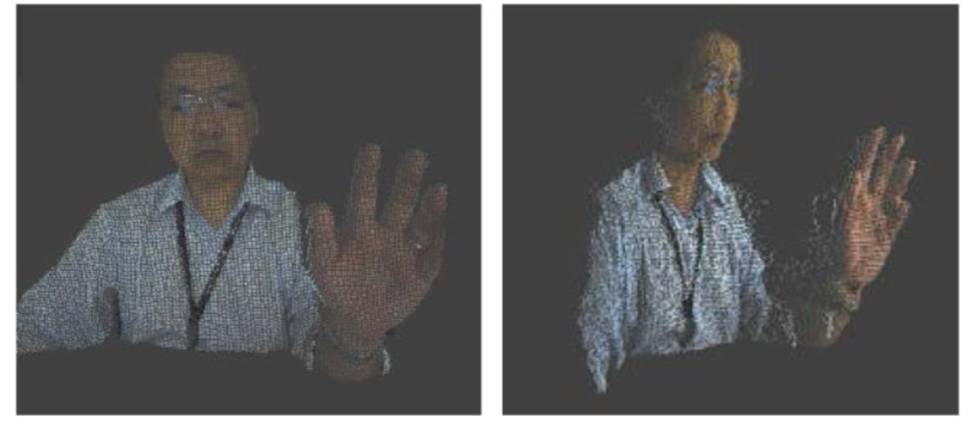
图
5
: 从点云生成的人像
4.其他的视觉技术




