正文
图 1- ADAS异构传感器融合实例
另一种方案是提供第二个图像传感器,以实现立体视觉。这种方案是让两个图像传感器朝着相同方向,但分开一小段距离,就像人的两个眼睛那样,通过视差确定对象在视场中的深度。像这样使用多个相同类型的图像传感器,称为同构传感器融合。
当然,本例中的应用针对所用的架构和所选的传感器类型确定驾驶要求。这包括深度感的范围、测量精度、环境光和天气条件、实现成本以及实现复杂程度。
嵌入式视觉不仅可用于对象检测和汽车防撞,还可以作为导航系统的一部分,用来识别交通标志信息。未来还可融合更多种不同图像,例如医用 X 光、MRI(核磁共振成像)和 CT,或者安防和观察应用的可见图像和红外图像。
我们通常认为嵌入式视觉应用只使用可见电磁光谱,其实很多嵌入式视觉应用能融合来自可见电磁光谱以外的数据。
器件选择
在嵌入式视觉系统中,通常使用 All Programmable Zynq®-7000 或 Zynq® UltraScale+™ MPSoC 器件来实现图像处理流水线。如果这些器件能用于传统的嵌入式视觉应用,那么也适用于嵌入式视觉融合应用。处理器系统与可编程逻辑的紧密结合能消除传统 CPU/GPU 实现方案中出现的瓶颈、确定性降低和时延增加问题。可编程逻辑 IO 结构的灵活性支持实现到高带宽接口(如图像传感器、RADAR 和 LIDAR 等)的任意连接。
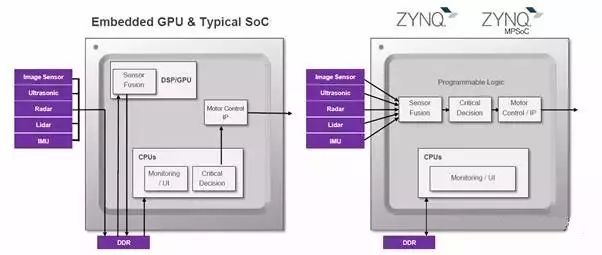
图 2 - 传统 CPU/GPU 方案与 All Programmable Zynq-7000 / Zynq UltraScale+ MPSoC 的对比
对于嵌入式视觉传感器融合应用,我们可进一步利用处理器系统提供连接众多低带宽传感器的接口。例如,加速计、磁力仪、陀螺仪和 GPS 传感器都配有串行外设接口 (SPI) 和内部集成电路 (i2c) 接口,都得到 All Programmable Zynq-7000 和 Zynq UltraScale+ MPSoC 器件的支持。这使软件能够快速、简便地从多种不同类型的传感器中获取所需信息,并提供给可扩展架构。需要一种方法能够利用行业标准框架(如 OpenXV、OpenCV 和 Caffe)开发传感器融合应用,这时可使用 reVISION™ 堆栈。
reVISION 堆栈





