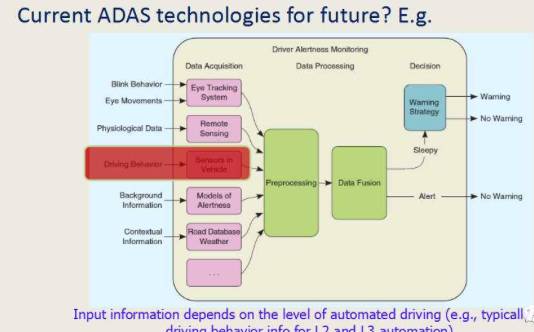
对于现有的ADAS技术,因为驾驶员始终处于驾驶控制回路中,驾驶辅助系统通过传感器采集驾驶员操作行为,提供相应的辅助措施。然而到了二级、三级自动驾驶,部分工况下车辆可以自主行驶,驾驶员一旦离开了控制回路,没有了对方向盘、踏板的直接操作,现有的许多ADAS算法就不再适用。那么针对未来高级自动驾驶技术的ADAS系统及算法就需要新的考量与设计。
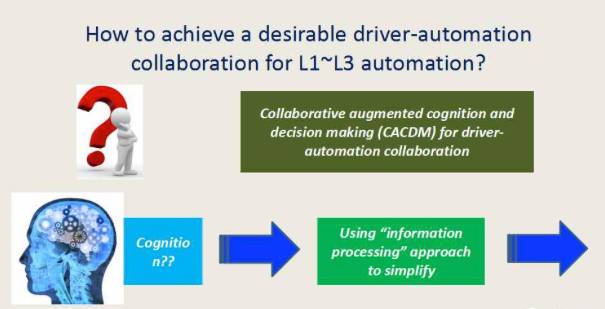
针对L1-L3自动驾驶,因为仍然有人类驾驶员的参与,那么思考的主要问题是应该如何实现理想的人车协同、人机共驾?
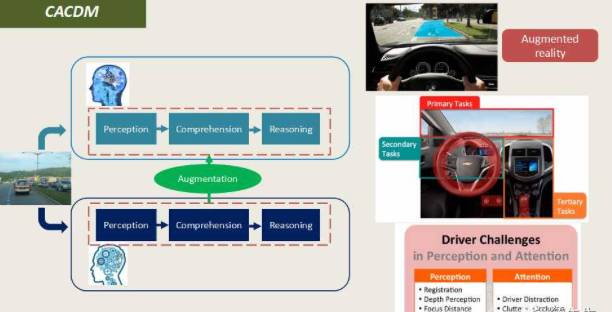
这里,曹博士团队针对人车协同提出了一套“协同增强认知与决策Collaborative augmented cognition and decision making(CACDM)”的理论体系框架。采用的“information processing”方法来对驾驶员的认知情况进行简化,以适用于车辆工程的实际应用。
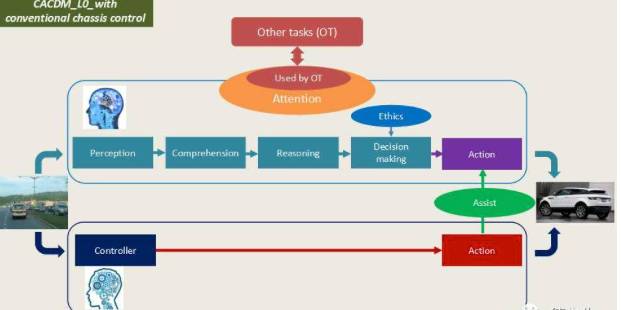
传统非自动驾驶车辆在没有底盘动力学控制系统干预下
,完全由驾驶员实现对周围环境的感知、驾驶任务决策以及对车辆的实际控制。驾驶员注意力集中在驾驶任务中。
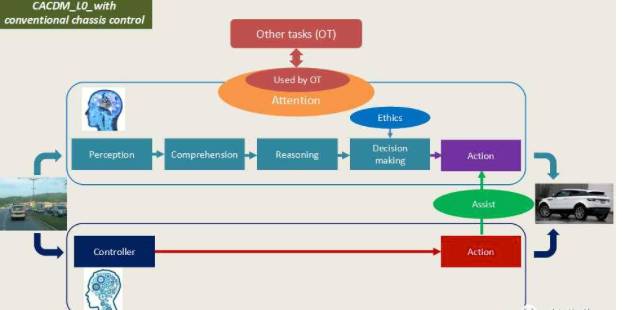
对于带有底盘动力学控制系统的传统车辆
,车辆控制器一定程度上也会介入车辆状态的干预。此时驾驶员注意力仍然集中在驾驶任务中。
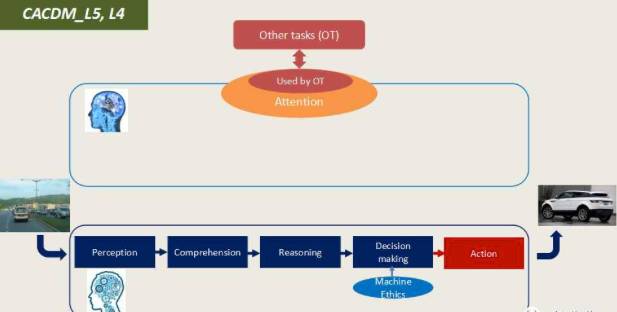
对于四级、五级自动驾驶车辆
,驾驶员可以完全脱离对车辆的控制,由自动驾驶系统实现车辆的感知、决策、规划及控制任务。这是驾驶员的注意力可以解放出来,去执行一些非驾驶任务。
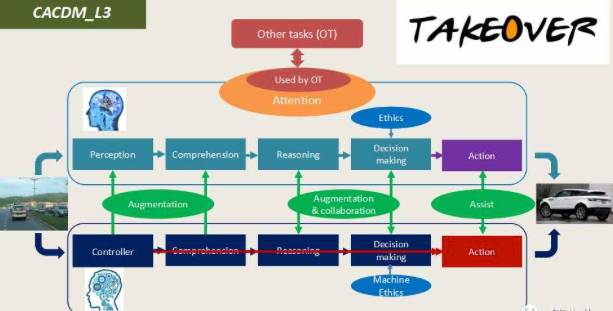
而对于L3 三级自动驾驶,情况则是最复杂的。
常规情况下,车辆自主驾驶,驾驶员可以做些别的事情,注意力被非驾驶任务占据。而当遇到车辆控制器无法处理的情况,需要人类接管时,通过接管信号令驾驶员的注意力从非驾驶任务中退出,重新回到驾驶任务,实现感知、决策直至人工驾驶。与此同时,车辆控制器也由自主驾驶退回到传统的底盘动力学控制。可以看到L3自动驾驶中,车辆控制权限的交接是具备一定时间尺度的过程。并且人类在车辆完全自主驾驶情况下,他的注意力被不同非驾驶任务的占用情况也是千差万别,例如他可以看窗外风景、可以玩游戏、可以看手机发邮件、甚至是打盹睡觉,因此如何设置接管信号以保障交接过程的安全、平顺,包括信号的类型、强弱,都需要进行深入研究及验证。
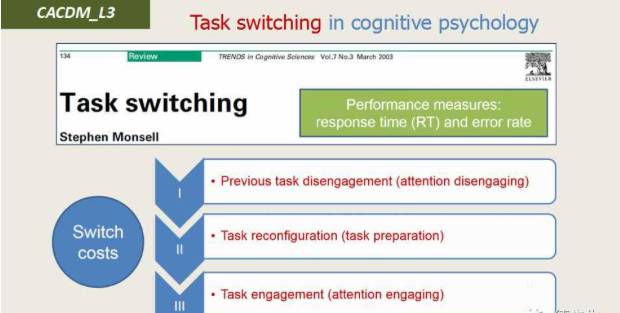
在认知心理学领域针对人类任务的切换与表现评价已有深入的研究,任务切换过程大致可分为三个步骤:
前序任务的退出、新任务重构、及任务的占用
,这三个步骤也依次对应人类注意力的变化。
依据相关理论,针对不同级别的自动驾驶技术,曹博士在报告中指出了相应的人机共驾、权限交接的方法。
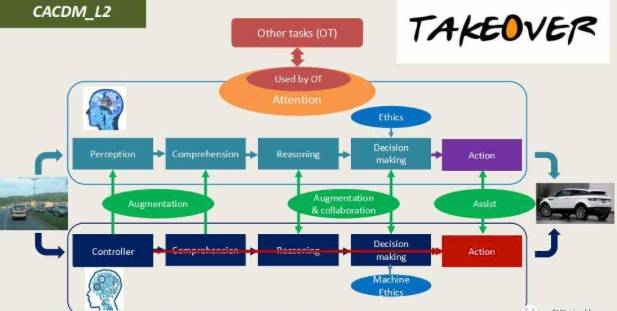
针对L2 二级自动驾驶,驾驶员可在部分工况下不参与驾驶操作,但注意力必须时刻集中在驾驶任务。因此,曹博士团队提出了这样一种方案,通过机器对驾驶员的增强感知、人机协同推理与决策,进而实现人机共驾。
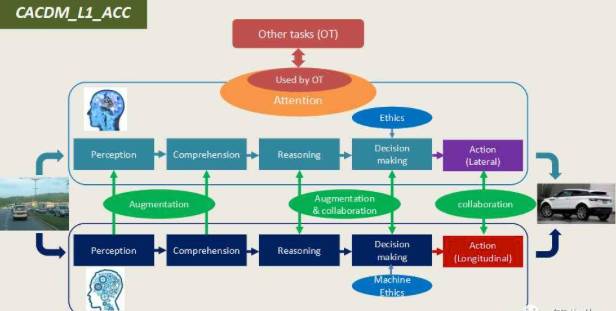
对于更低级别的自动驾驶
,这里以L1自动驾驶中的ACC情景为例,也是通过机器对驾驶员进行增强感知、增强理解,进一步的,人机协同推理与决策,进而实现在车辆纵、横向综合控制层面的人机协同控制。
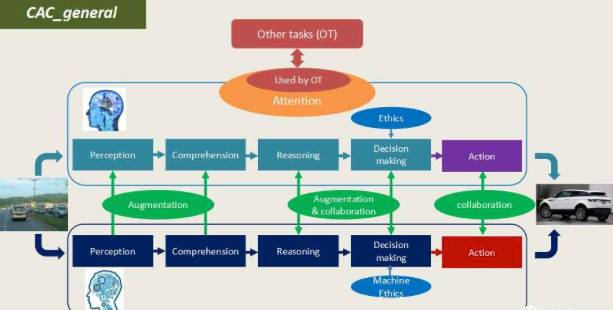
这里曹博士报告中提炼出一种
具有普适性的“协同增强认知CAC”框架
,针对自动驾驶,通过机器对驾驶员进行增强感知、增强理解,人机协同增强推理与决策,最终实人机共驾。
在这个理论框架下,可以针对工程化应用,进行一定程度的简化,即
在感知、理解与推理阶段,通过机器智能对人类驾驶员进行增强辅助。
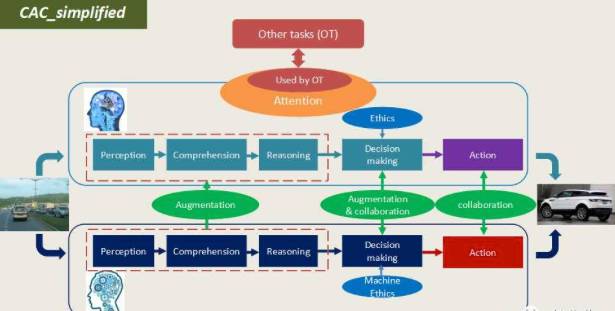
在感知、理解与推理阶段,因为人类无论是在感知还是在注意力方面,都有自身的局限性
,例如人类视觉的物理极限、视觉的准确性、对色彩的敏感性,人类还会在开车时犯困、分心等等,所以可以通过增强现实AR等技术让机器智能对人进行增强辅助,提高人类驾驶的安全性、舒适性等。
目前曹博士团队在此方面也开展了相关研究。例如,了解驾驶员在开车转弯过程中,眼睛具体看的是道路什么位置,驾驶员视线远近对应其驾驶的意图、是否分心的状态。