正文
如果激光雷达要想在无人车上普及首先就应该降低价格。有两种解决办法:其一,采用低线数雷达配合其他传感器,但需搭配拥有极高计算能力系统的无人车;其二,采用固态激光雷达。
激光雷达最贵的就是机械旋转部件,固态激光雷达无需旋转部件,采用电子设备替代,因而体积更小,方便集成在车身内部,系统可靠性提高,成本也可大幅降低。但由于缺乏旋转部件,水平视角小于180°,所以需要多个固态雷达组合一起配合使用才行。
在CES2016上展出的两款重量级产品,其一是来自Quanergy的“固态”Solid State雷射雷达S3,采取相控阵技术,内部不存在任何旋转部件,仅为一盒名片大小,单个售价初步定在250美元,量产后可能降至100美元;其二是由Velodyne与福特共同发布的混合固态雷射雷达VLP-16 PUCK,2020年计划量产价为500美元,2025年计划把成本控制在200美金以内。
奥迪的无人驾驶汽车A7 Piloted Driving就采用了Ibeo和Valeo合作的Scala混合固态雷射雷达,在外观上看不到旋转部件,但内部仍靠机械旋转实现雷射扫描。此前国内雷达制造商速腾聚创宣布完成的16线激光雷达采用的也是混合固态的形式。
固态雷达雷达产品则由于采用电子方案去除了机械旋转部件,因此具有低成本(几百美元级别)和体积小、可集成至传统车辆外观中的特点。行业对固态雷达的出现仍处观望态度,主要因为:首先,对成本是否能有如此大幅下降抱有疑问;其次,激光特性在大雾等天气仍然并不适用。
目前,激光雷达已被应用在某些无人驾驶试验车中:
Google和百度的无人驾驶试验车均采用了Velodyne的64线雷射雷达;
福特的混动版蒙迪欧安装了Velodyne的32线雷射雷达,第三代自动驾驶车辆Fusion Hybrid配置了2台Velodyne的混合固态雷射雷达;
日产LEAF搭载了6个Ibeo的4线雷射雷达,测试了其高级驾驶辅助系统;
奥迪的无人驾驶汽车A7 Piloted Driving采用了Ibeo和Valeo合作的Scala混合固态雷射雷达;
德尔福无人驾驶汽车配备了4台由Quanergy研发的固态雷射雷达;
大众的一款半自动驾驶汽车搭载了Scala,该雷射雷达隐藏在保险杠内,用于取代毫米波雷达做AEB的测距模块。
国外激光雷达研发厂商比较有代表性的有 Velodyne、Ibeo和Quanergy,并且他们都背靠巨头。Velodyne成立于1983年,位于加州硅谷。当年美国举办的世界无人车挑战赛获得第一名和第二名的高校卡耐基梅隆大学和斯坦福大学,使用的就是Velodyne的激光雷达。
目前其已有包括 Velodyne16、32、64线激光雷达三个系列。Ibeo 是无人驾驶激光雷达供应商,成立于1998年, 2010年和法雷奥合作开始量产可用于汽车的产品 ScaLa,其目前主要供应4线和8线的激光雷达。Quanergy位于加州硅谷硅谷中心,成立于2012 年,虽然相对“年轻”,但它造出了全球第一款固态激光雷达。
国内在激光雷达研发的企业则主要有北醒光子、思岚科技、镭神智能、速腾聚创、禾赛科技。其中,北醒光子目前的产品有三大系列:单线环境雷达DE-LiDAR 1.0、多线长距雷达DE-LiDAR 2.0 和固态雷达DE3.0系列(多线长距雷达目前正在研发,可做到8到32线);镭神智能成立于2015年初,是一家提供中远距离脉冲测距激光雷达等产品及解决方案的公司;速腾聚创刚宣布完成其混合固态的16线激光雷达研发。
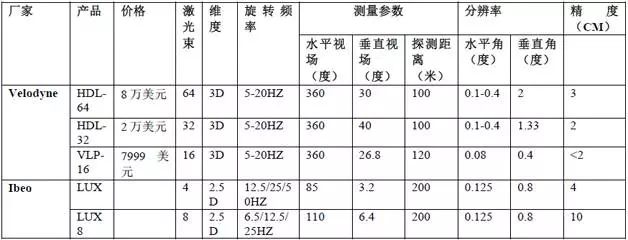
表2 Velodyne和Ibeo产品规格对比
毫米波雷达通过发射无线电信号(毫米波波段的电磁波)并接收反射信号来测定汽车车身周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等),然后根据所探知的物体信息进行目标追踪和识别分类,进而结合车身动态信息进行数据融合,完成合理决策,减少事故发生几率。
毫米波雷达的工作频段为30~300GHz毫米波,毫米波的波长为波长为1~10mm,介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。
雷达测量的是反射信号的频率转变,并计算其速度变化。雷达可以检测30-100米远的物体,高端的雷达能够检测到很远的物体。
同时,毫米波雷达不受天气状况限制,即使是雨雪天都能正常运作,穿透雾、烟、灰尘的能力强。具有全天候、全天时的工作特性,且探测距离远,探测精度高,被广泛应用于车载距离探测,如自适应巡航、碰撞预警、盲区探测等。
相比激光雷达,毫米波雷达精度低、可视范围的角度也偏小,一般需要多个雷达组合使用。雷达传输的是电磁波信号,因此它无法检测上过漆的木头或是塑料(隐形战斗机就是通过表面喷漆来躲过雷达信号的),行人的反射波较弱几乎对雷达“免疫”。
同时,雷达对金属表面非常敏感,如果是一个弯曲的金属表面,它会被雷达误认为是一个大型表面。因此,路上一个小小的易拉罐甚至可能会被雷达判断为巨大的路障。此外,雷达在大桥和隧道里的效果同样不佳。
毫米波雷达的可用频段有24GHz、60GHz、77GHz、79GHz,主流可用频段为24GHz和77GHz,分别应用于中短距和中长距测量。比于24GHz,77GHz毫米波雷达物体分辨淮确度可提高2-4倍,测速和测距精确度提高3-5倍,能检测行人和自行车;且设备体积更小,更便于在车辆上安装和部署。
如表3所示,长距离雷达的侦测范围更广,可适配开行速度更快的车辆,但是相应地探测精度下降,因此更适用于ACC自适应巡航这类的应用。典型的长距离雷达有博世的一款产品,其探测前向距离为250米;典型的短距离雷达有大陆的一款产品,其探测距离为前向60米后向20米。
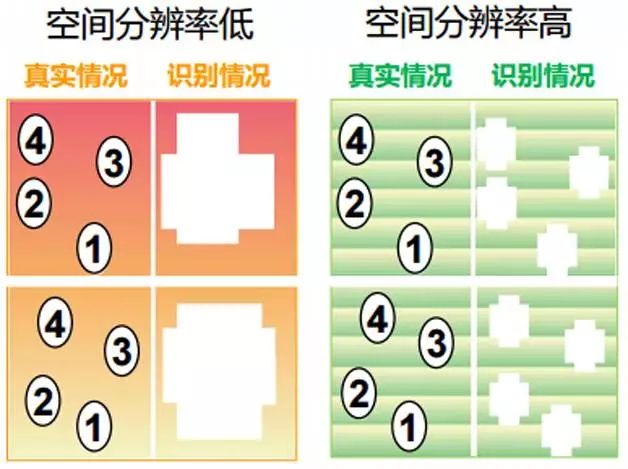
图6 中距和短距雷达空间分辨率对比
为完全实现ADAS各项功能一般需要“1长+4中短”5个毫米波雷达,目前全新奥迪A4采用的就是 “1长+4短”5个毫米波雷达的配置。以自动跟车型ACC功能为例,一般需要3个毫米波雷达。
车正中间一个77GHz的LRR,探测距离在150-250米之间,角度为10度左右;车两侧各一个24GHz的 MRR,角度都为30度,探测距离在50-70米之间。图7是奔驰的S级车型,采用的是7个毫米波雷达(1长+6短)。

图7 毫米波雷达在无人驾驶中的使用
电磁波频率越高,距离和速度的检测解析度越高,因此频段发展趋势是逐渐由24GHz向77GHz过渡的。1997年,欧洲电讯标准学会确认76-77GHz作为防撞雷达专用频道。早在2005年原信息产业部发布《微功率(短距离)无线电设备的技术要求》将77GHz划分给车辆测距雷达。
2012年,工信部进一步将24GHz划分给短距车载雷达业务。2015年日内瓦世界无线电通信大会将77.5-78.0GHz频段划分给无线电定位业务,以支持短距离高分辨率车载雷达的发展,从而使76-81GHz都可用于车载雷达,为全球车载毫米波雷达的频率统一指明了方向。至此之后,最终车载毫米波雷达将会统一于77GHz频段(76-81GHz),该频段带宽更大、 功率水平更高、探测距离更远。

表3 中长距和短距雷达参数对比
三、计算平台










