正文
日本国土交通省则决定最早将于2017年秋季制定有关在高速公路同车道行驶的自动驾驶安全法规。
目前,我国由工信部组织起草的智能网联汽车标准体系方案已形成标准框架体系,该标准体系框架包括基础、通用规范、产品与技术应用、相关标准四个主要部分。
智能驾驶的核心不在车而在人,是物化驾驶员在长期驾驶实践中,对“环境感知-决策规划-控制执行”过程的理解、学习和记忆。环境感知作为第一环节,处于智能驾驶车辆与外界环境信息交互的关键位置,其关键在于使智能驾驶车辆更好地模拟人类驾驶员的感知能力,从而理解自身和周边的驾驶态势。
相机、雷达、定位导航系统等为智能驾驶车辆提供了海量的周边环境及自身状态数据,这些以图像、点云等形式呈现的数据包含了大量与驾驶活动无关的信息。选择性注意作为人类自然感知的重要特征,可以帮助智能驾驶车辆聚焦当前驾驶行为,确保智能驾驶的安全性和实时性。环境感知需要遵照近目标优先、大尺度优先、动目标优先、差异性优先等原则,采用相关感知技术对环境信息进行选择性处理。
智能驾驶车辆上安装的每类传感器也都有自身的感知盲区。智能驾驶过程中,通过组合使用多类传感器和运用时序关联的感知技术,可以缩小感知盲区的范围,一般不会影响正常驾驶。
智能驾驶车辆获取和处理环境信息,主要用于状态感知和V2X网联通信。V2X(即Vehicle to Everything,车辆同所有交通参与者)网联通信强调了车辆、道路、使用者三者之间的联系, 主要利用RFID(Radio Frequency Identification,射频识别)、拍照设备、云服务器等获得实时路况、道路信息、行人信息等一系列交通信息,从而提高驾驶安全性和驾驶效率。
状态感知主要通过车载传感器对周边及本车环境信息进行采集和处理,包括交通状态感知和车身状态感知。V2X网联通信是利用融合现代通信与网络技术,实现智能驾驶车辆与外界设施和设备之间的信息共享、互联互通和控制协同。
按照获取交通环境信息的途径,可将这些传感器分为两类:1)被动环境传感器,主要包括相机等视觉传感器和麦克风阵列等听觉传感器2)主动环境传感器,主要指激光雷达、毫米波雷达和超声波雷达。
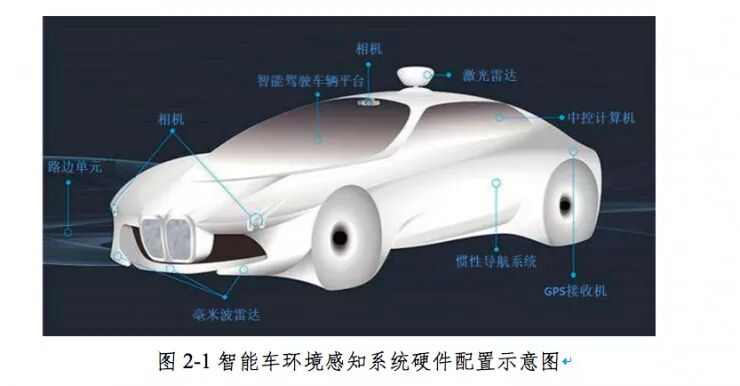
可用于智能驾驶环境感知的硬件设备有很多,主要包括相机、激光雷达、毫米波雷达、超声波雷达、GPS、BDS、INS等。目前智能车上采用的配置方案往往是多种型号或多种类型设备的组合。如下图
无论是单目相机、双目相机,还是多目相机、深度相机,无论像素再清晰、采样速率再高,也无法解决所有图像采集和处理的难题。由于道路环境、天气环境的多样性、复杂性以及智能驾驶车辆本身的运动特性,相机容易受到光照、视角、尺度、阴影、污损、背景干扰和目标遮挡等诸多不确定因素的影响。
雷达对光照、色彩等干扰因素具有很强的鲁棒性,但是无论安装多少数量/种类的雷达、选取多高的采样速率,都不可能彻底解决凹坑反射、烟尘干扰和雨、雪、雾等恶劣天气条件下的探测难题。
定位导航系统为智能驾驶提供了高精度、高可靠定位、导航和授时服务,RTK(Real-Time Kinematic,载波相位差分技术) + INS组合更是为实时精准定位和位置精度保持奠定了重要基础。但是无论位置服务公共平台多好、陀螺精度多高,还是存在采样频率不够、地理环境过于复杂、初始化时间过长、卫星信号失效等问题,因此定位导航系统总是存在缺陷。
感知功能的实现既需要合适的感知设备,也离不开相应的感知技术。按照传感器获取的信号类型,可分为相机视觉、雷达传感和听觉传感。
在智能驾驶中,相机取代人类视觉系统作为交通环境感知的传感器之一。相较于其他传感器,视觉传感器安装使用的方法简单、获取的图像信息量大、投入成本低、作用范围广,并且近些年更是得益于数字图像处理技术的快速发展和计算机硬件性能的提高。但是在复杂交通环境下,视觉传感器依然存在目标检测困难、图像计算量大、算法难以实现的问题,视觉感知技术在应对道路结构复杂、人车混杂的交通环境时也还存在很多不足。
视觉感知技术主要包括三种:
-
1)单目视觉技术,即通过单个相机完成环境感知任务,具有结构简单、算法成熟并且计算量较小的优点,但是感知范围有限、无法获取场景目标的深度信息;
-
2)立体视觉技术,基本原理是采用2个(或多个)相机从不同视点观察同一目标,并通过计算图像像素间位置偏差恢复三维场景,难点在于寻找多个相机图像中匹配的对应点;
-
3)全景视觉技术,成像视野较宽,但图像畸变较大、分辨率较低。
-
雷达传感
在国内外智能驾驶车辆开发过程中,传感感知技术研究的重点除了视觉就是雷达。雷达通过对目标发射电磁波并接收目标回波来获得目标的距离、方位、距离变化率等信息。
(1)雷达传感器
雷达传感器一般由发射机、发射天线、接收机、接收天线、显示器、处理部分以及电源设备、数据录取设备、抗干扰设备等辅助设备构成。按照电磁波的波段,雷达分为三类:激光雷达、毫米波雷达、超声波雷达。

雷达受外界环境影响小,获取的深度信息可靠性高,测距范围和视角大、准确度高。另外,雷达每帧接收的点云数据量远小于相机记录的图像信息,更能满足智能驾驶对实时性的需求。雷达的最大缺点在于制造工艺复杂、成本很高,在一定程度上使其广泛应用受到限制。
目前激光雷达常用的感知技术主要有:
-
障碍物检测与跟踪,关键在于同一时刻障碍点的聚类和不同时刻障碍物的匹配,基于深度学习的雷达障碍物检测逐渐成为近年来的研究热点,雷达与图像融合的障碍物检测技术研究也取得了一定成果;
-
路面检测,主要是为了区分路面和道路上的其他目标障碍物,还可以通过检测路面材质和坡度为智能驾驶车辆决策和控制提供数据参考;
-
定位与导航,基于激光雷达的SLAM在智能车定位中可以发挥重要作用,智能车通过检测路边障碍物位置判断道路走向并实现基于雷达的自主导航;
-
三维重建,利用激光雷达获取的深度信息即可以实现智能车周围环境的三维场景重建。
目前大部分智能驾驶车辆仅依靠视觉感知和雷达感知,已经能够完成绝大多数交通环境感知任务,因此往往忽略了听觉感知。交通环境中有许多声音也会携带重要信息,例如喇叭、警笛等智能驾驶车辆同样需要对环境中的声音有所感知并做出反应。
按照相对于智能车辆位置区域的范围,听觉感知能力可分为三类:1)个域听觉感知2)局域听觉感知3)广域听觉感知。
听觉感知系统主要涉及三种关键技术:声源定位技术、音频识别技术和软件无线电技术。
目前常用的声源定位技术按其定位原理可分为三大类:
-
基于最大输出功率的可控波束形成技术,关键在于对接收的信号的滤波及加权求和,并控制阵列波束指向最大输出功率对应的方向;
-
基于高分辨率谱估计的定位技术,通过求解所接收信号与阵列间的相关矩阵确定信号源方向和位置;
-
基于声达时间差的定位技术,主要是利用声源信号到每个麦克风阵元的时间差估计来实现测向和测距。
智能驾驶的基础是自主导航,不仅需要获取车辆与外界环境的相对位置关系,还需要通过车身状态感知确定车辆的绝对位置,因此定位与导航也是环境感知的关键技术之一。
智能驾驶车辆的位置数据不可能脱离感知态势的基准,目前在智能驾驶中常用的基准包括:大地坐标系(WGS-84/ CGCS 2000)、摄像机坐标系、图像坐标系、雷达坐标系、驾驶员认知坐标系等。
目前主要有GPS、北斗卫星导航系统、GLONASS和GALILEO四大全球卫星导航系统,我国常用的为GPS和北斗卫星导航系统。
卫星导航定位技术按照定位方式分为单点定位技术和相对定位技术。
相对定位又分为静态定位和动态定位两种类型,其中实时动态定位RTK技术是一种新的常用的卫星定位测量方法。RTK是一种基于载波相位观测值的定位技术,利用了参考站和移动站之间观测误差的空间相关性。与以前的静态定位和动态定位不同,RTK无需事后结算即可在野外实时得到厘米级的定位精度,成为卫星定位应用的重大里程碑。
(2)惯性导航系统
惯性导航系统(简称惯导)由陀螺仪和加速度计构成,通过测量运动载体的加速度和角速率数据,并将这些数据对时间进行积分运算,从而得到速度、位置、姿态和航向。
惯性导航系统能够提供包括水平姿态、方位、速度、位置、角速度和加速度等的全面的导航信息,而且数据更新率高、连续性好、噪点低、短期精度和稳定性高。惯导也存在其固有缺陷:定位误差会随时间而增大,数据的长期精度较低,而且无法获取时间信息。另外,惯导在每次使用之前需要较长时间的初始化,在智能驾驶过程中如果出现断电等突发状况,往往需要重新初始化。










