正文
从视频中可以看出,在动作方面,比如人在她面前丢了一本书,她就会立即做出反应,并告知人类:“你掉了一个东西(something)”,不过目前她也只能识别出这个动作本身,至于动作的内容(别如识别掉落的物体)她并不能进行识别。
而在语言方面,人类与其对话时,表现出不友好的一面,比如用粗俗的语言跟她对话,她也不会像Siri一样机械地进行回答,而是会情绪化的对人类语言进行“反击”,并“怒目而视”。
Nadia Thalmann说,对于机器人来说,给它加入动作识别及功能是非常重要的,因为一个真正的社交机器人应该能理解用户的行为,并用以手势、面部表情、目光等动作加以回应。
要达到以上的目标是非常难的,所以,Nadia Thalmann也在会上提出了社交机器人未来研发的三点挑战:
-
让机器能够全面的感知用户的行为,并对用户的行为进行解释分析,理解用户的意图。
-
做好利用局部传感让机器人在社交场合做出适合当时环境、语境的行为决策,而不是机械般的程式化。
-
多线交流(不只是和一个人对话,而是多人环境)的同步以及反映的实时性的提升。
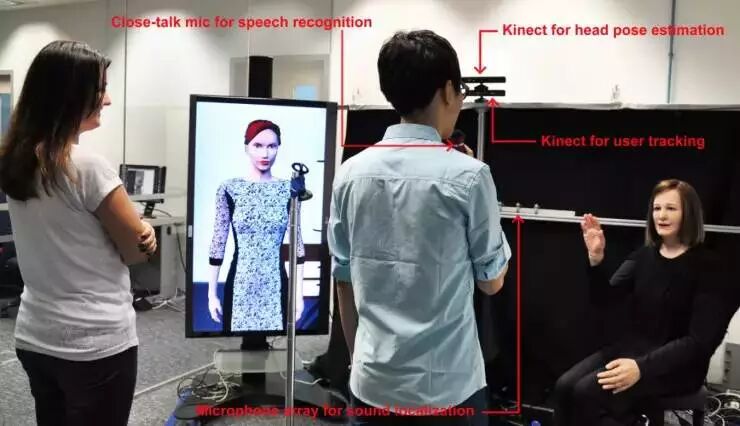
这些研究重点将在未来会一一实现,目前Nadine机器人只能有二十多种表情,而且能够识别的动作也有限,并且只能使用类似Kincet的体感设备来感知人的动作,未来在传感器等硬件方面还会有很大的提升空间。为了能够早日完成以上有挑战的研究点,Nadia Thalmann以及她的研究团队做出了一些具体的任务规划,来逐步完成:
-
第一阶段:让机器人能够和人类对话并对人类的生活方面的某些数据进行长期监测。它能够帮用户做一些简单的事情,并且根据你的行为特征来分析一些对用户自身有意义的数据,比如健康信息,并且这些信息会嵌入到智能系统当中,当机器人跟你进行对话时就会将这些信息透露给你,举个例子,当你连续工作好几天,没有得到正常的休息,机器人就会提醒你:你已经很久没睡了,应该休息一下。
-
第二阶段:在第一阶段的基础上增添多模式交互的框架,该框架能够使机器人能够完全理解用户的语言,并且在于人类聊天的时候,能够进行面部表情、手势等外部语言辅助的表达,并能够识别人类的表情和手势。
-
第三阶段:有独立的思想和情感,能够基于人格和人类进行情感交互,比如能够有信任、同情等这类的抽象情感,并且能帮助人类解决更高级的问题,能提出更具有说服力的决策意见,成为你生活中完全的助手。
这样的目标量化对于完成真正的类人机器人的目标目前看起来貌似是可行的,在这其中就要做很多细致的工作,比如从外观开始做,研究一些适合机器人的3D打印项目,来给机器人做基础;还有仿生科技的研究,能够让机器人的行为举止不至于倾向“恐怖谷”,要更加的自然。以上属于外观的建模,除此之外还需要给机器人做情绪建模,这方面就复杂的多,涉及的知识点异常庞杂。
但拎出外观或者内核都不是最难的,其中最难点,也就是Nadia Thalmann她们正在研究的,是如何将二者完美的结合,让其语言和动作进行一个自然的交互状态,这才是类人机器人未来发展的关键所在。机器人真的达到第三阶段能够对人类有多大的帮助还不太好说,但一定能给人类的生活带来翻天覆地的变化。










