正文
二、功能设计
如何做多群直播呢?简单的就是用机器人做二级转发:
-
新建一个直播主讲群
-
将三个机器人和主讲人拉进群里
-
主讲人发到群里的消息机器人都自动转发到群里
-
机器人转发完毕后在主讲群回复
-
继续发消息
为了大家便于理解,猪哥画了一个简单的设计图:
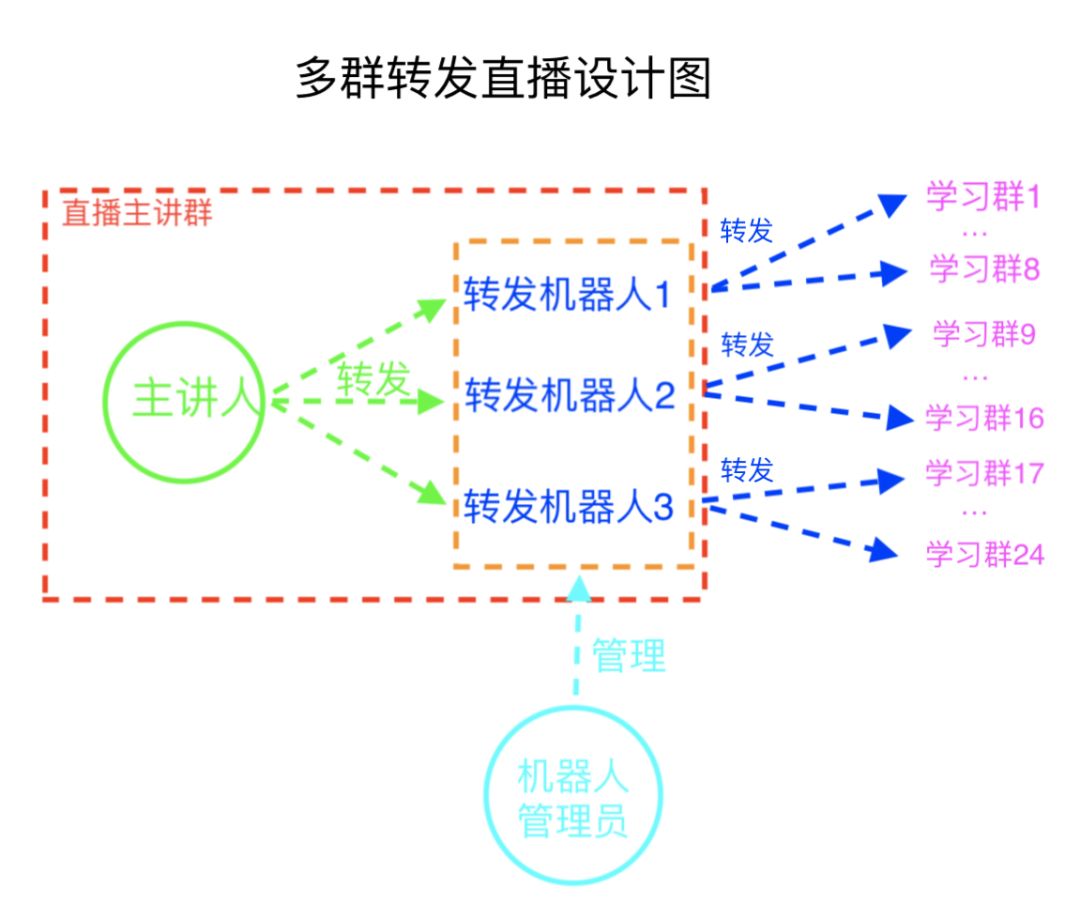
根据上图设计,我们这次功能设计有5个主要元素:
主讲群、主讲人、转发群、
机器人
、机器人管理员
。
三、功能实现
1.加载直播信息
根据上面的设计图,我们得知首先需要一个
直播主讲群
,然后直播群里个
主讲人
,然后还需要加载需要转发的
转发群
。
这些信息我们都可以在写在一个配置文件里面。
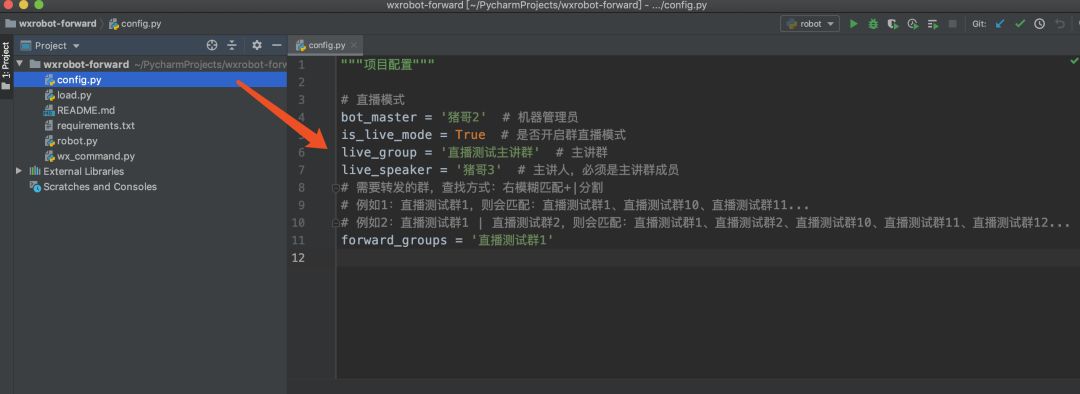
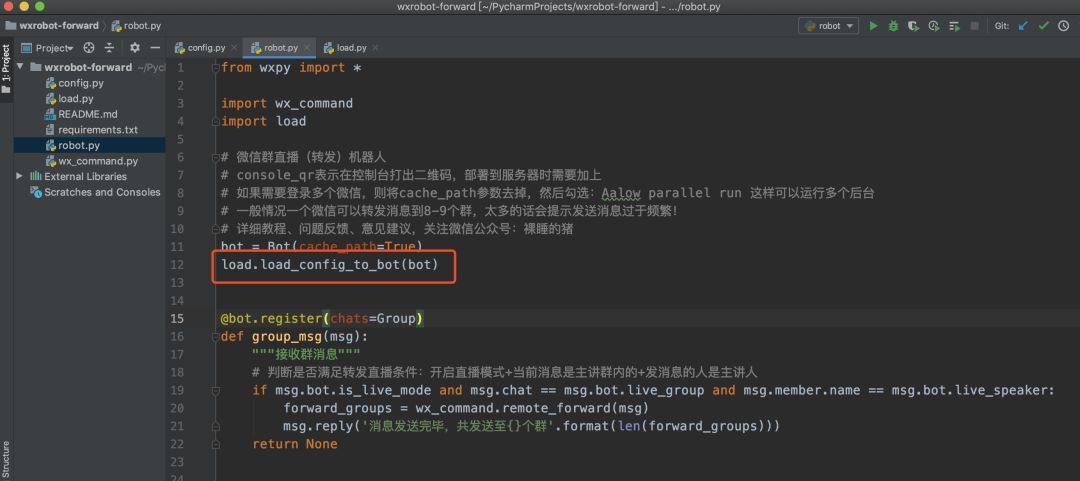
然后我们在机器人启动的时候,调用加载配置文件的方法,而加载配置文件的方法又去调用加载直播信息的方法!
首先是加载机器人管理员,然后在方法中间去调用加载群信息的方法!
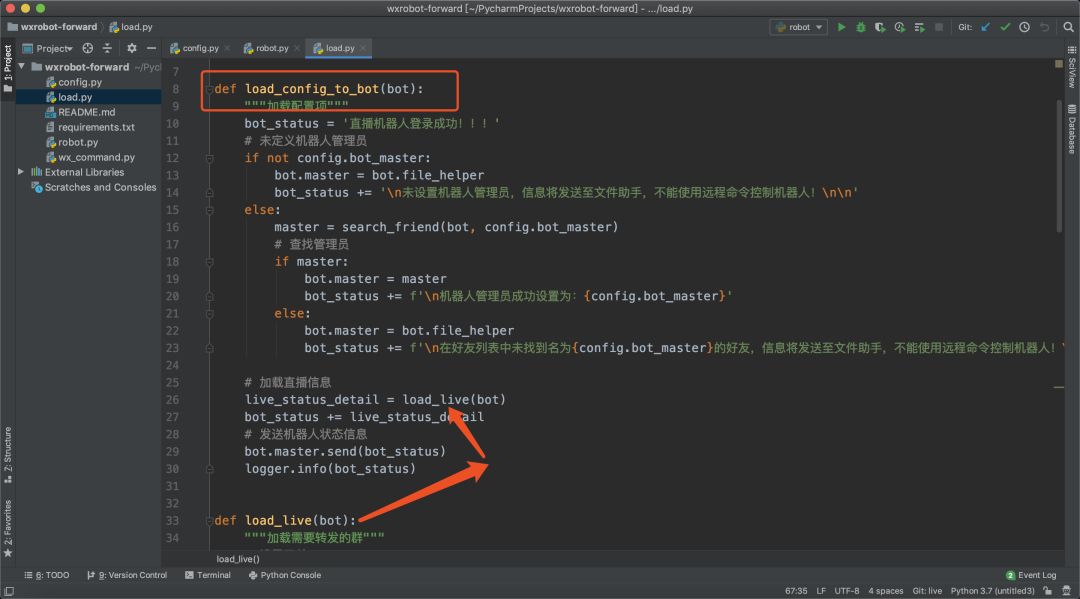
下面是load_live方法的详细代码,主要做三件事:
加载主讲群、检查主讲群里是否有主讲人、加载直播群。
def load_live(bot): """加载直播需要的群""" # 设置开关 bot.is_live_mode = config.is_live_mode if not bot.is_live_mode: return '\n未开启直播模式,可在 config.py 文件中将 is_live_mode 设置为True开启!' live_status_detail = '' # 1、加载主讲群 live_group = bot.groups().search(config.live_group) if len(live_group) < 1: bot.live_group = None bot.is_live_mode = False return f'\n主讲群:未找到群名包含「{config.live_group}」的主讲群!\n开启群直播失败!\n\n可在主讲群中发任意消息,然后管理员使用命令:开启群直播模式,从新加载直播信息!' elif len(live_group) > 1: bot.live_group = live_group[0] live_status_detail += f'\n主讲群:找到多个群名包含「{config.live_group}」的主讲群,默认选取第一个群({live_group[0]})作为主讲群!' else: bot.live_group = live_group[0]
# 2、加载主讲人 live_group_members = bot.live_group.members for member in live_group_members: if member.name == config.live_speaker: live_status_detail += f'\n主讲人:「{config.live_speaker}」' bot.live_speaker = config.live_speaker break else: live_status_detail += f'\n主讲人:主讲群内未找到主讲人「{config.live_speaker}」。\n开启群直播失败!'





