正文
1.1
扫地机器人智能化升级,导航技术是核心
扫地机器人智能化升级,感知模块重要性突出。
扫地机器人最早在欧美市场销售,近年来随着深度学习、机器视觉等AI技术的发展,扫地机器人产品的迭代不断加快,向智能化方向升级。目前,市场主流机型可分为随机式清扫(第一代)、规划式清扫(第二代)和导航建图式清扫(第三代),后两代都具备路径规划技术,这使得环境感知模块的重要性愈发突出。智能扫地机器人以自动清扫的方式解放年轻人打扫压力,同时其智能化特性引发年轻人的“猎奇”心理,使得市场规模高速增长。
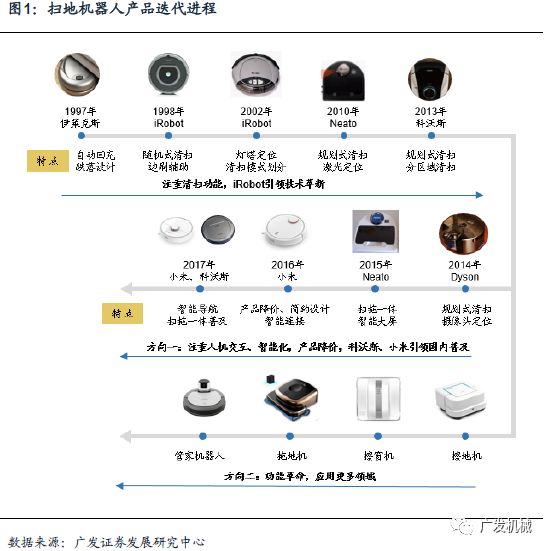
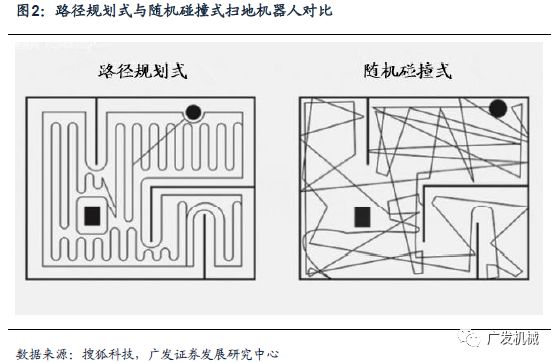
随机式扫地机器人清扫效果靠时间和不断的重复来堆砌,经常会出现反复清扫或大面积漏扫的情况,算法的优劣直接决定了清扫质量和效率高低(实际上,随机式产品也包含了简单算法,例如撞墙时的转向角度等)。
路径规划式产品增加了定位导航,清扫过程有迹可循,清扫面积和效率相比随机式要高很多,但规划式产品必须要有定位的能力,需要进行地图构建和规划清扫。当前的定位与地图构建的主流技术主要是SLAM。
SLAM(Simultaneous Localization And Mapping)
的含义是即时定位与地图构建,指的是机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航。SLAM问题可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。
自主定位导航需要三大技术:
(1)
实时定位(Localization)。
目前GPS的精度只能达到半米,而且实时定位的更新频率很快,需要达到10次/秒,GPS定位技术无法满足。定位包括相对定位和绝对定位:相对定位主要依靠内部本体感受传感器如里程计、陀螺仪等,通过给定初始位姿,来测量相对于机器人初始位姿的距离和方向来确定当前机器人的位姿,也叫做航迹推测(Dead Reckoning,DR);绝对定位主要采用主动或被动标识、地图匹配、GPS、或导航信标进行定位。位置的计算方法包括有三角测量法、三边测量法和模型匹配算法等。
(2)
绘制地图(Mapping)
。导航领域是有专人绘制的,然而家居的实时变化决定了扫地机器人需要在没有人工干预的情况下自主画图。
(3)
路径规划。
机器人绘制的地图可以向任意方向行驶,因此其路径规划还包括避障和直接控制行为,导航仪是由人来决定,机器人是用算法决定的,因此算法是路径规划的。
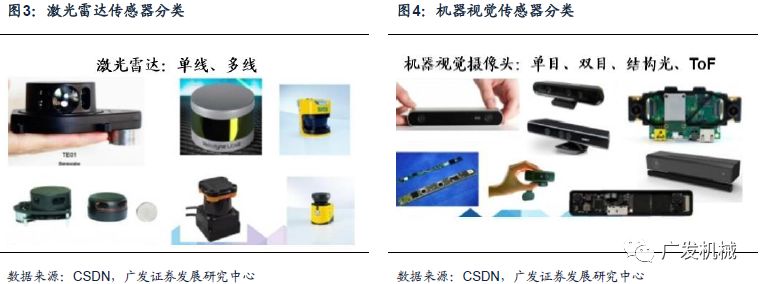
由于传感器种类和安装方式的不同,SLAM的实现方式和难度会有一定的差异。按传感器来分,SLAM技术主要分为两类,
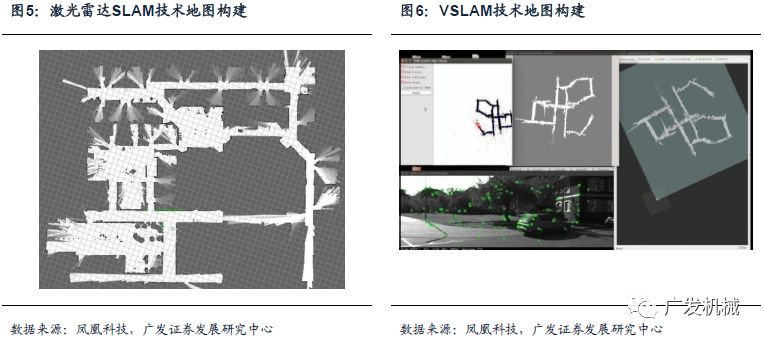
一类是基于LDS激光测距传感器的SLAM技术,另一类是基于机器视觉的SLAM。
其中,激光SLAM比VSLAM起步早,框架已经初步确定,因此产品落地相对成熟,主要分为单线式和多线式。基于视觉的SLAM又称为VSLAM(Visual SLAM),目前的主流算法是基于RGBD的深度摄像机,分为单目、多目、结构光(进一步分为单目结构光和多目结构光)、ToF等。随着机器视觉的迅速发展,VSLAM技术因为信息量大、适用范围广等优点受到关注,目前尚处于应用场景拓展、产品逐渐落地阶段。
1.2
LDS方案:技术成熟,降低成本是关键
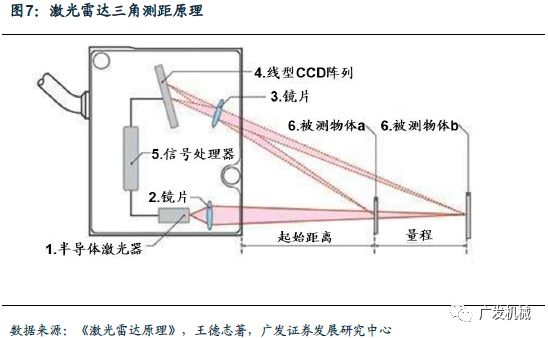
激光雷达SLAM是LDS激光测距传感器与SLAM技术的结合。激光雷达测距LDS的原理是:从半导体激光器以一定的入射角度发射一束或n束激光照射被测物体,激光在物体表面发生散射或折射,通过透镜对反射激光汇聚成像,光斑成像在CCD传感器上(Charge-coupled Device,感光耦合组件)。当物体发生位移时,光斑也将随之产生移动,其位移大小通过信号处理器的计算而获得,由光斑位移距离计算出被测物体与基线的距离值。由于入射光和反射光构成一个三角形,位移计算运用了几何三角定理,故又被称为激光三角测距法。这种方法能够获得精度较高的距离信息。
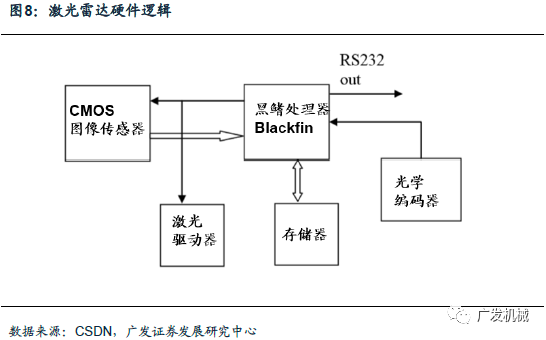
LDS的硬件工作流程分为几步:1.发射激光,同时感光芯片曝光;2.读取像素数据;3.计算出像素的质心位置;4.将步骤3中的计算结果(像素位置)换算成距离信息。
阻碍LDS大规模推广的主要还是价格因素。
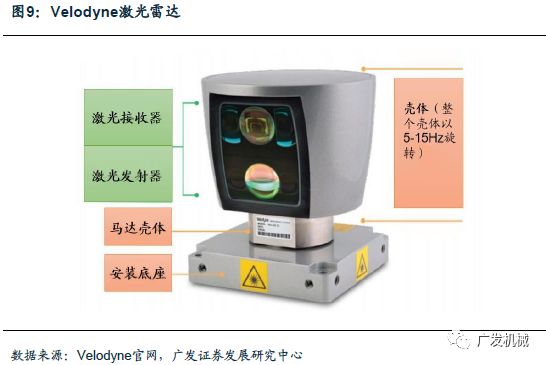
目前,LDS技术比较成熟的是美国Velodyne公司,随着技术的发展与革新,LDS成本持续降低,为其应用领域扩展提供有力支持。
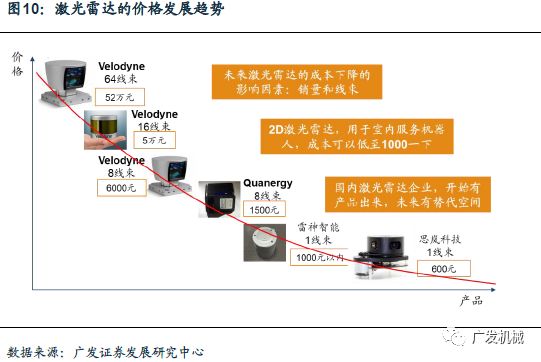
影响LDS价格的主要有两大要素:线束数量和采购量。
通常线束越高,价格越高;采购量越大,价格越低。Quanergy公司通过降低线束维度,逐步使用固态激光雷达,让成本降低到了250美元左右,国内企业思岚科技,可以在采购量超过1万台左右时,单线束的价格可以降低到1000元以内。随着终端用户的产品放量,激光雷达的产业化将会带动价格打破瓶颈区域。
激光雷达按照激光束的数量可以分为1线(2D)、4线、8线、16线、32线、64线激光雷达,不同线型、厂商的激光雷达售价差别也相对较大。根据精度和功能需求的不同,智能装备所用的型号不同,具备高度自主移动功能的移动式机器人(如无人驾驶汽车、无人机),需要配备长距离8线以上的激光雷达,成本较高。
相比之下,对空间测距范围需求有限的扫地机器人大多采用1线短距离LDS,相对较低的成本也有利于LDS在该领域的推广
。目前来看,新一代扫地机器人已经开始利用LDS技术替换传统随机碰撞式产品,例如小米和Neato的扫地机器人主要走LDS方向,而科沃斯产品则覆盖了LDS与VSLAM技术。以小米为例,2016年公布的米家扫地机器人,搭载了小米自主研发的LDS传感器,可以实现360°扫描,测距达到了1800次/秒。该产品会根据LDS获取的精确距离信息,通过SLAM算法实时绘制房间地图,提高清扫效率和质量。










