正文
CS型接口距离为12.5mm,CS型镜头与CS型摄像机可以配合使用。C型镜头与CS型摄像机之间增加一个5mm的C/CS转接环可以配合使用,CS型镜头与C型摄像机无法配合使用。
F型:
通用型接口,一般适用于焦距大于25mm的镜头。
基本参数
视场:
即FOV,也叫视野范围,指观测物体的可视范围,也就是充满相机采集芯片的物体部分。
工作距离:
即WD,指从镜头前部到受检测物体的距离,即清晰成像的表面距离。
分辨率:
图像系统可以测到的受检验物体上的最小可分辨率特征尺寸,在多数情况下,视野越小,分辨率越好。
景深:
即DOF,物体离最佳焦点较近或比较较远时,镜头保持所需分辨率的能力。
焦距(f):
是光学系统中衡量光的聚集或发散的度量方式,指从透镜的光心到光聚焦之焦点的距离,也是照相机中,从镜片中心到底片或CCD等成像平面的距离。
焦距大小的影响情况:
焦距越小,景深越大;焦距越小,畸变越大;焦距越小,渐晕现象越严重,使像差边缘的照度降低。
失真:
又称为畸变,指被摄物平面内的主轴直线,经光学系统成像后变为曲线,则此光学系统的成像误差称为畸变,畸变像差只影响影像的几何形状,而不影响影像的清晰度。
光圈与F值:
光圈是一个用来控制镜头通光量的装置,它通常是在镜头内,表达光圈大小我们是用F值,如f2,f4。
工业相机的选择要点
1.视野范围、光学放大倍数及期望的工作距离:
在选择镜头时,我们会选择比被测物体视野稍大一点的镜头,有利于运动控制。
2.景深要求:
对于对景深有要求的项目,尽可能使用小光圈;在选择放大倍率的镜头时,在项目许可下尽可能选用低倍率镜头;如果项目要求比较苛刻时,倾向选择高景深的尖端镜头。
3.芯片大小和相机接口:
例如2/3镜头支持最大的工业相机耙面为2/3,它是不能支持1英寸以上的工业相机。
4.注意与光源的配合,选配合适的镜头。
5.可安装空间:
在方案可选择情况下,让客户更改设备尺寸是不现实的。
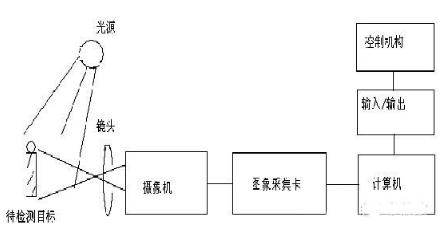
机器视觉的工作原理
机器视觉检测系统是采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来收取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格/不合格、有/无等,实现自动识别功能。
机器视觉特点
1. 摄像机的拍照速度自动与被测物的速度相匹配,拍摄到理想的图像;
2 .零件的尺寸范围为2.4mm到12mm,厚度可以不同;
3. 系统根据操作者选择不同尺寸的工件,调用相应视觉程序进行尺寸检测,并输出结果;
4 .针对不同尺寸的零件,排序装置和输送装置可以精确调整料道的宽度,使零件在固定路径上运动并进行视觉检测;
5 .机器视觉系统分辨率达到2448×2048,动态检测精度可以达到0.02mm;
⒍.废品漏检率为0;
7 .本系统可通过显示图像监视检测过程,也可通过界面显示的检测数据动态查看检测结果;





