正文
RGBD-SLAM-V2
RGB-D
https://github.com/felixendres/rgbdslam_v2
Elastic Fusion
RGB-D
https://github.com/mp3guy/ElasticFusion
Hector SLAM
激光
http://wiki.ros.org/hector_slam
GMapping
激光
http://wiki.ros.org/gmapping
OKVIS
多目+IMU
https://github.com/ethz-asl/okvis
ROVIO
单目+IMU
https://github.com/ethz-asl/rovio
表1 常用开源 SLAM 方案
MonoSLAM
说到视觉SLAM,很多研究者第一个想到的是A. J. Davison的单目SLAM工作。Davison教授是视觉SLAM研究领域的先驱,他在2007年提出的MonoSLAM是第一个实时的单目视觉SLAM系统[2],被认为是许多工作的发源地。MonoSLAM以扩展卡尔曼滤波为后端,追踪前端非常稀疏的特征点。由于EKF在早期SLAM中占据着明显主导地位,所以MonoSLAM亦是建立在EKF的基础之上,以相机的当前状态和所有路标点为状态量,更新其均值和协方差。
图1所示是MonoSLAM在运行时的情形。可以看到,单目相机在一幅图像当中追踪了非常稀疏的特征点(且用到了主动追踪技术)。在EKF中,每个特征点的位置服从高斯分布,所以我们能够以一个椭球的形式表达它的均值和不确定性。在该图的右半部分,我们可以找到一些在空间中分布着的小球。它们在某个方向上显得越长,说明在该方向的位置就越不确定。我们可以想象,如果一个特征点收敛,我们应该能看到它从一个很长的椭球(相机Z方向上非常不确定)最后变成一个小点的样子。
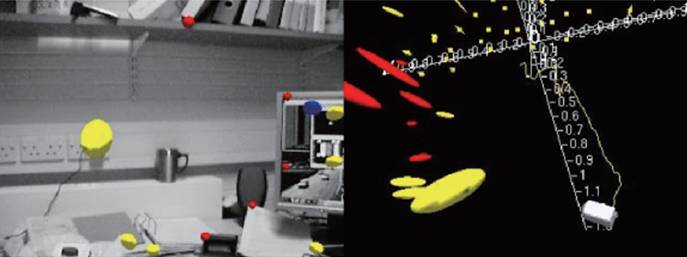
图1 MonoSLAM的运行时截图
左侧:追踪特征点在图像中的表示
右侧:特征点在三维空间中的表示
这种做法在今天看来固然存在许多弊端,但在当时已经是里程碑式的工作了,因为在此之前的视觉SLAM系统基本不能在线运行,只能靠机器人携带相机采集数据,再离线地进行定位与建图。计算机性能的进步,以及用稀疏的方式处理图像,加在一起才使得一个SLAM系统能够在线地运行。从现代的角度来看,MonoSLAM存在诸如应用场景很窄,路标数量有限,稀疏特征点非常容易丢失的情况,对它的开发也已经停止,取而代之的是更先进的理论和编程工具。不过这并不妨碍我们对前人工作的理解和尊敬。
PTAM
2007年,Klein等人提出了PTAM(Parallel Tracking and Mapping),这也是视觉SLAM发展过程中的重要事件。PTAM的重要意义在于以下两点:
-
PTAM提出并实现了跟踪与建图过程的并行化。我们现在已然清楚,跟踪部分需要实时响应图像数据,而对地图的优化则没必要实时地计算。后端优化可以在后台慢慢进行,然后在必要的时候进行线程同步即可。这是视觉SLAM中首次区分出前后端的概念,引领了后来许多视觉SLAM系统的设计(我们现在看到的SLAM多半都分前后端)。
-
PTAM是第一个使用非线性优化,而不是使用传统的滤波器作为后端的方案。它引入了关键帧机制:我们不必精细地处理每一幅图像,而是把几个关键图像串起来,然后优化其轨迹和地图。早期的SLAM大多数使用EKF滤波器或其变种,以及粒子滤波器等;在PTAM之后,视觉SLAM研究逐渐转向了以非线性优化为主导的后端。由于之前人们未认识到后端优化的稀疏性,所以觉得优化后端无法实时处理那样大规模的数据,而PTAM则是一个显著的反例。
PTAM同时是一个增强现实软件,演示了酷炫的AR效果(如所示)。根据PTAM估计的相机位姿,我们可以在一个虚拟的平面上放置虚拟物体,看起来就像在真实的场景中一样。

图2 PTAM的演示截图
它既可以提供实时的定位和建图
也可以在虚拟平面上叠加虚拟物体
不过,从现代的眼光看来,PTAM也算是早期的结合AR的SLAM工作之一。与许多早期工作相似,存在着明显的缺陷:场景小,跟踪容易丢失,等等。这些又在后续的方案中得以修正。
ORB-SLAM
介绍了历史上的几种方案之后,我们来看现代的一些SLAM系统。ORB-SLAM是PTAM的继承者中非常有名的一位(见图3)。它提出于2015年,是现代SLAM系统中做得非常完善、非常易用的系统之一(如果不是最完善易用的话)。ORB-SLAM代表着主流的特征点SLAM的一个高峰。相比于之前的工作,ORB-SLAM具有以下几条明显的优势:
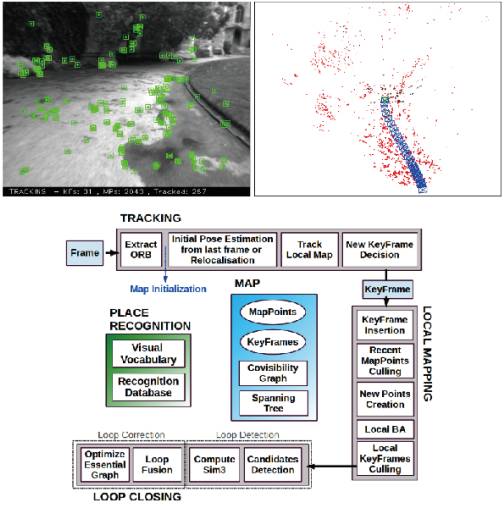
图3 ORB-SLAM运行截图
左侧为图像与追踪到的特征点,右侧为相机轨迹与建模的特征点地图
下方为其标志性的三线程结构
-
支持单目、双目、RGB-D三种模式。这使得无论我们拿到了哪种常见的传感器,都可以先放到ORB-SLAM上测试一下,它具有良好的泛用性。
-
整个系统围绕ORB特征进行计算,包括视觉里程计与回环检测的ORB字典。它体现出ORB特征是现阶段计算平台的一种优秀的效率与精度之间的折中方式。ORB不像SIFT或SURF那样费时,在CPU上面即可实时计算;相比Harris角点等简单角点特征,又具有良好的旋转和缩放不变性。并且,ORB提供描述子,使我们在大范围运动时能够进行回环检测和重定位。










