正文
当机器人走过崎岖度较小的碎石地面时,通常依靠脚踝的转动适应地面斜度而保持平衡;然而,当地面崎岖度比较尖锐时,依靠脚踝转动适应地面极易达到踝关节转动极限,从而导致机器损坏。
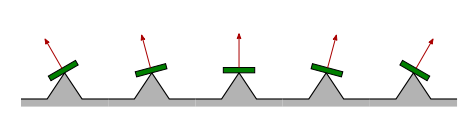
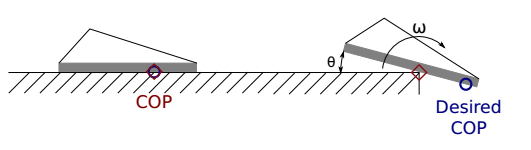
机器人走过尖锐的线接触或点接触地面示意图:首先保持足部接近水平方向而非严格适应地面斜度,然后逐步转动脚踝变换有效接触面法线方向防止足部滑落。
新的控制算法中,研究者控制机器人脚部接近水平方向而非严格与地面斜度一致,为了保持平衡,利用位置控制保持脚部方向平行于接触线,并利用
垂直于接触线的转矩来变换接触线上的压力中心
(CoP)。通过转动脚踝,随之变换有效的接触面法线方向从而防止足部滑落。
预估地形落脚点及最佳压力中心(CoP)
预估当前地形
对于机器人平衡和行走时如何放置压力中心(center of pressure,CoP)十分重要。当地形状况未知时,机器人每走一步都需要预估下一步的落脚点。
首先假设整个足部接触地面,然后机器人开始在落脚点区域计算其足部的局部压力中心,如果预期压力中心(Desired CoP)位于足部受地面支撑的区域,那么精确的压力中心将十分接近该预期压力中心;然而,当预期压力中心位于足部未受地面支撑的区域,则需要旋转足部脚踝改进对地形的预估,也即是除去这部分不能支撑重量的落脚点部分。研究者通过测量脚踝转动速度,或者基于脚步及地面几何形状来探测脚部的转动运动。