正文
●
●
●
如何开发生物机器人?
研究人员通过繁殖细胞来制造生物机器人。一般他们会选用鸡、老鼠的心肌或者骨骼肌,在对活细胞无毒副作用的支架上进行增殖。
如果基板材质是高分子聚合物(polymer),制造出来的就是生物合成机器人——天然材料和人造材料的混合体。
但是,如果把细胞组织直接放置到模制骨架上,会造成前者在各个方向的“野蛮生长”。这意味着,用电刺激让它们动作时,细胞组织的收缩力量会均匀应用于各个方向——根本无法精确控制,而且效率低下。
为了更好控制细胞的力量,研究人员求助于
细胞图案化技术(micropatterning)
。他们用细胞喜欢攀附其上的材质,把微尺度线条印在骨架上。这些线条起到向导作用——细胞组织倾向于沿着它生长。于是,研究人员获得了符合设计图案的细胞排列,如何把肌肉收缩力量施加于基板变得可控。因此,所有细胞能够协作起来,使生物机器人的腿或者鳍能够像动物那样动作,而不是一块受到刺激就胡乱收缩的肉团。
●
●
●
仿生合成生物机器人
除了各种生物合成机器人,研究人员们还通过只使用天然材料,创造出了一些“纯”生物机器人——
基板的高分子聚合物被皮肤胶原取代,成为机器人的躯体。
当它们受到电刺激,可以爬行或游泳。有研究人员受到医学组织工程技术的启发,开发出能使用直角手臂(悬臂)向前移动的机器人。
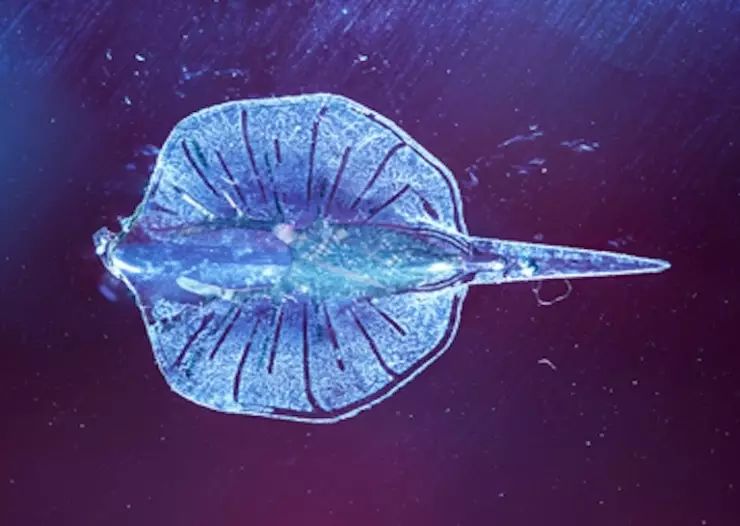
还有学者从自然界获得灵感,创造出仿生生物合成机器人。比如,一支加州理工学院的团队开发出仿生水母机器人“ medusoid”,它有环形排列的触手。借助细胞图案化技术,每一只触手都有打印的蛋白质线条,使细胞按照类似于真实水母肌肉组织的方式排列。细胞收缩时,触手向内弯曲,推动水母机器人向前游动。
仿生水母机器人“ medusoid”
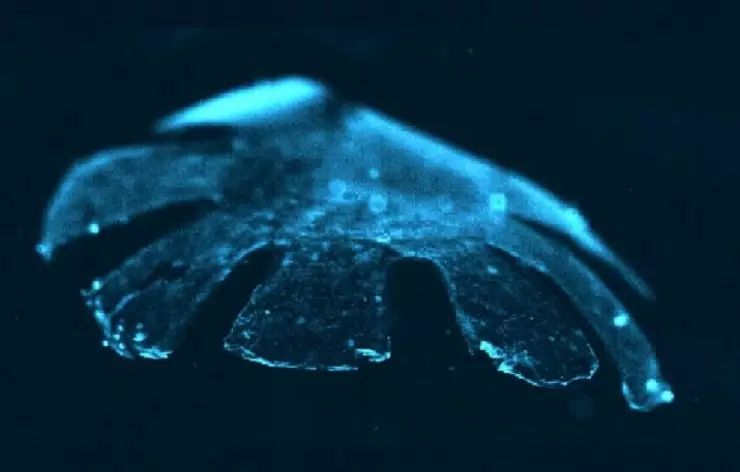
最近,哈佛大学的研究人员们展示了如何“驾驭”生物合成机器人。他们使用转基因心脏细胞,制作出一个仿生魔鬼鱼(蝠鲼)机器人,并能让它游动。这些经过基因编辑的心肌细胞,能对特定频率的光线做出反应——机器人一侧的细胞按照一个频率,另外一侧是另一个频率,这样就能通过光线变化控制游动的左右方向。
至于向前游动,当研究人员把光线投射到机器人前部,那里的细胞会收缩,并把电信号沿鱼体传递下去。鱼体由首至尾的交替收缩运动,推动机器人前进。

仿生魔鬼鱼机器人,金色部分是骨架(另见本文首图)
●
●
●
更强壮的生物机器人
虽然生物合成机器人领域已经有了许多突破性进展,但把这些机器人商业化并投入使用的时机远未成熟。目前,这些机器人产品寿命短、力量输出小,极大限制了处理各项任务的速度和能力。另外,使用鸟类和哺乳动物细胞开发的机器人对环境十分敏感。举例来说,环境温度必须保持与生物体温接近。还有,和动物一样,细胞需要定期补充营养——喂营养液。
一个潜在的解决方案是:把生物机器人包装起来
(类似皮肤对人的保护),
所以外部环境的影响不再那么致命,营养液的补充也可以建立起一个内部系统
(就像为人体细胞提供营养的血液循环系统)。
另外一个方案是:使用更皮实的细胞作为驱动器。
最近在凯斯西储大学,学者们通过研究生命力顽强的海蜗牛( Aplysia californica),探索它的可行性。海蜗牛栖息于潮间带,每天都会经历巨幅温差和盐度差。退潮时,有的海蜗牛会困在浅滩,水分会随光照蒸发。下雨时,周围环境的盐浓度又会巨幅下降。为适应复杂多变的栖息地状况,海蜗牛进化出坚硬的壳来保护自己。
研究人员实现了把海蜗牛肌肉组织作为驱动器,来驱动生物合成机器人。这意味着,我们能用这些更强壮的细胞组织来制造生物机器人。雷锋网获悉,目前该机器人已能搬运不大的物体——1.6 英寸长 1 英寸宽。
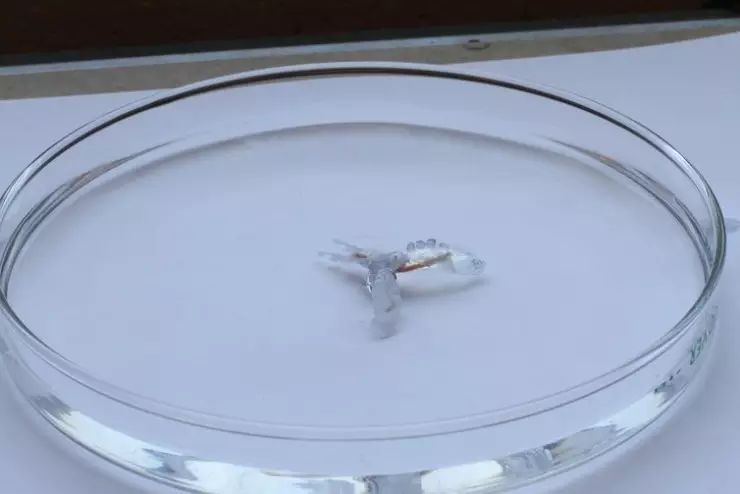


部分采用海蜗牛组织的生物机器人
●
●
●